



Next: Evolving Ensembles
Up: GBML Areas
Previous: GBML for Sub-problems of
Contents
Subsections
3.2 Genetic Programming
Genetic Programming (GP) is a major evolutionary paradigm which
evolves programs [286]. The differences between GP and
GAs are not precise but typically GP evolves variable-length
structures, typically trees, in which genes can be functions. See
[314] for discussion. [95] discusses
differences between GAs and GP which arise because GP representations
are more complex. Among the pros of GP: i) it is easier to represent
complex languages, such first-order logic, in GP, ii) it is easier to
represent complex concepts compactly, and iii) GP is good at finding
novel, complex patterns overlooked by other methods. Among the cons of
GP: i) expressive representations have large search spaces, ii) GP
tends to overfit / does not generalise well, and iii) variable-length
representations suffer from bloat (see e.g. [231]).
While GAs are typically applied to function optimisation, GP is widely
applied to learning. To illustrate, of the set of ``typical GP
problems'' defined by Koza [158], which have become
more-or-less agreed benchmarks for the GP community
[286], there are many learning problems. These include
the multiplexer and parity Boolean functions, symbolic regression of
mathematical functions and the Intertwined Spirals problem, which
involves classification of 2-dimensional points as belonging to one of
two spirals.
GP usually follows the Pittsburgh approach.
We cover the two representations most widely used for learning with
GP: GP trees and decision trees.
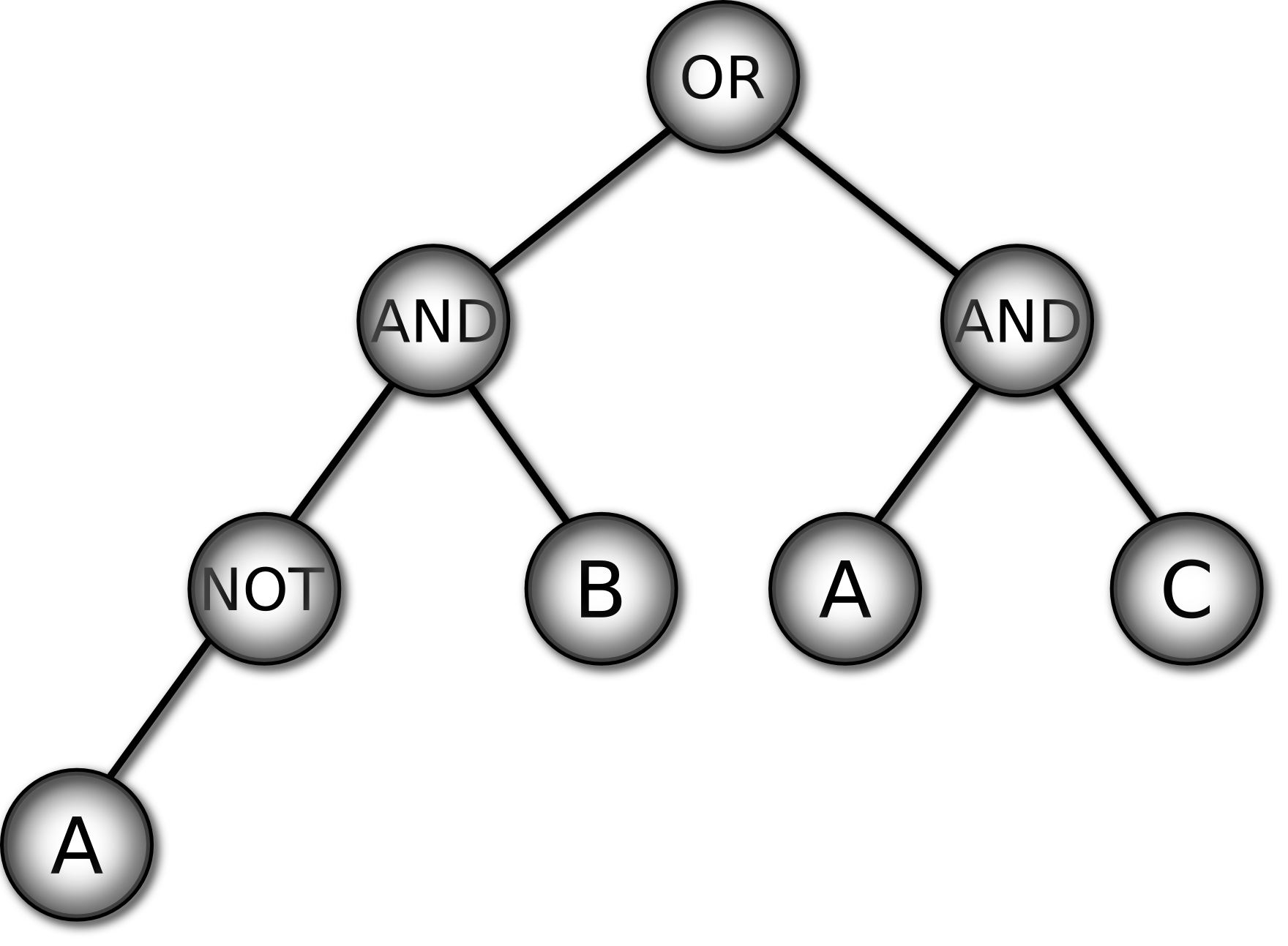
Figure 4 shows
the 3 multiplexer Boolean function as a truth table on the left and as
a GP tree on the right. To classify an input with the GP tree: i)
instantiate the leaf variables with the input values, ii) propagate
values upwards from leaves though the functions in the non-leaf nodes
and iii) output the value of the root (top) node as the
classification.
Figure 4:
Two representations of the 3 multiplexer function: truth
table (left) and GP tree (right)
| A |
B |
C |
Class |
| 0 |
0 |
0 |
0 |
| 0 |
0 |
1 |
0 |
| 0 |
1 |
0 |
1 |
| 0 |
1 |
1 |
1 |
| 1 |
0 |
0 |
0 |
| 1 |
0 |
1 |
1 |
| 1 |
1 |
0 |
0 |
| 1 |
1 |
1 |
1 |
|
|
GP Trees for Regression
In
regression problems leaves may be constants or variables and
non-leaves are mathematical functions. Figure 5 shows a real-valued function as an algebraic expression on the
left and as a GP tree on the right. (Note that
 ) The output of the tree is computed in the same
way as in the preceding classification example.
) The output of the tree is computed in the same
way as in the preceding classification example.
Figure 5:
Two representations of a real-valued function
|
|
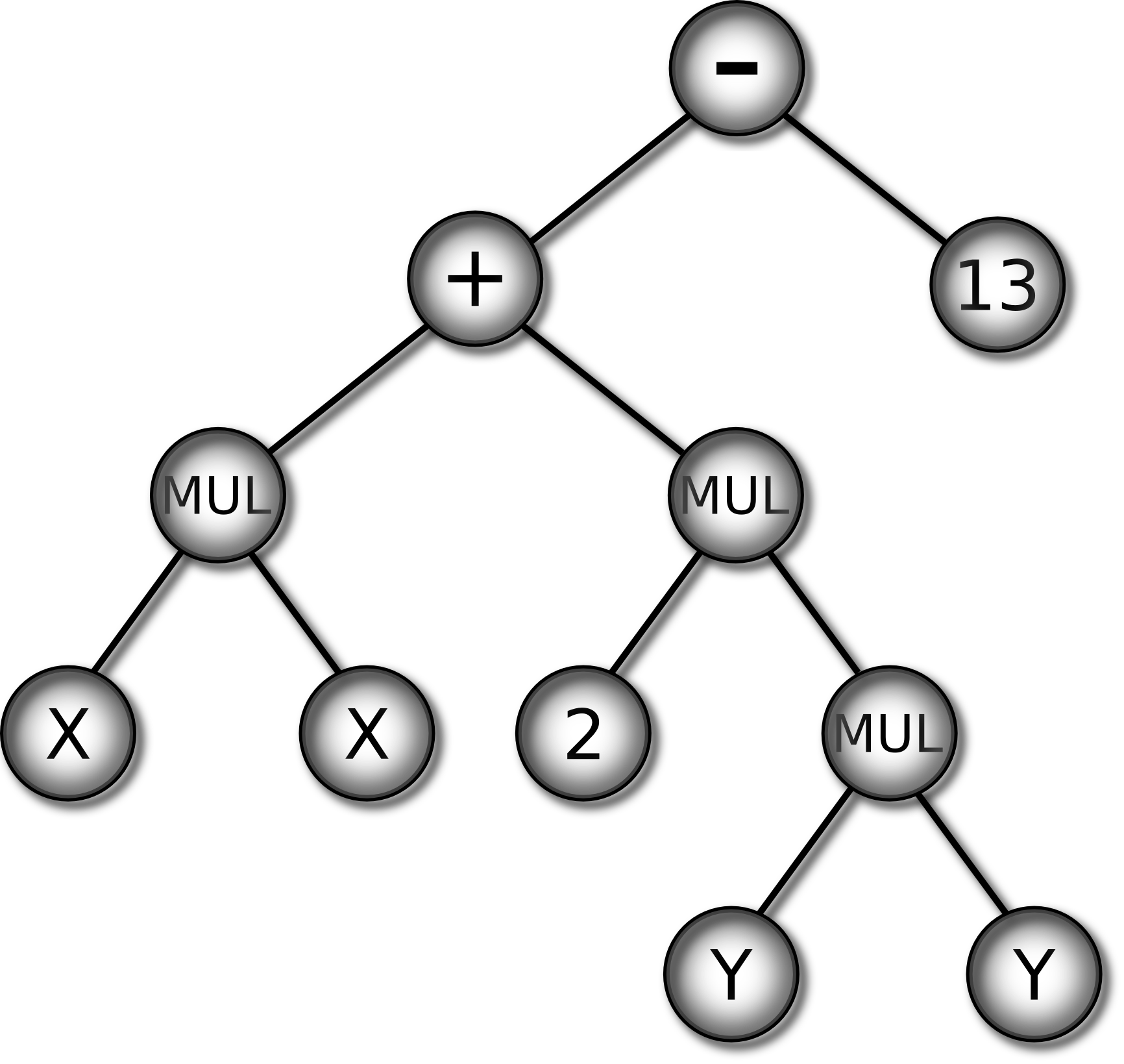 |
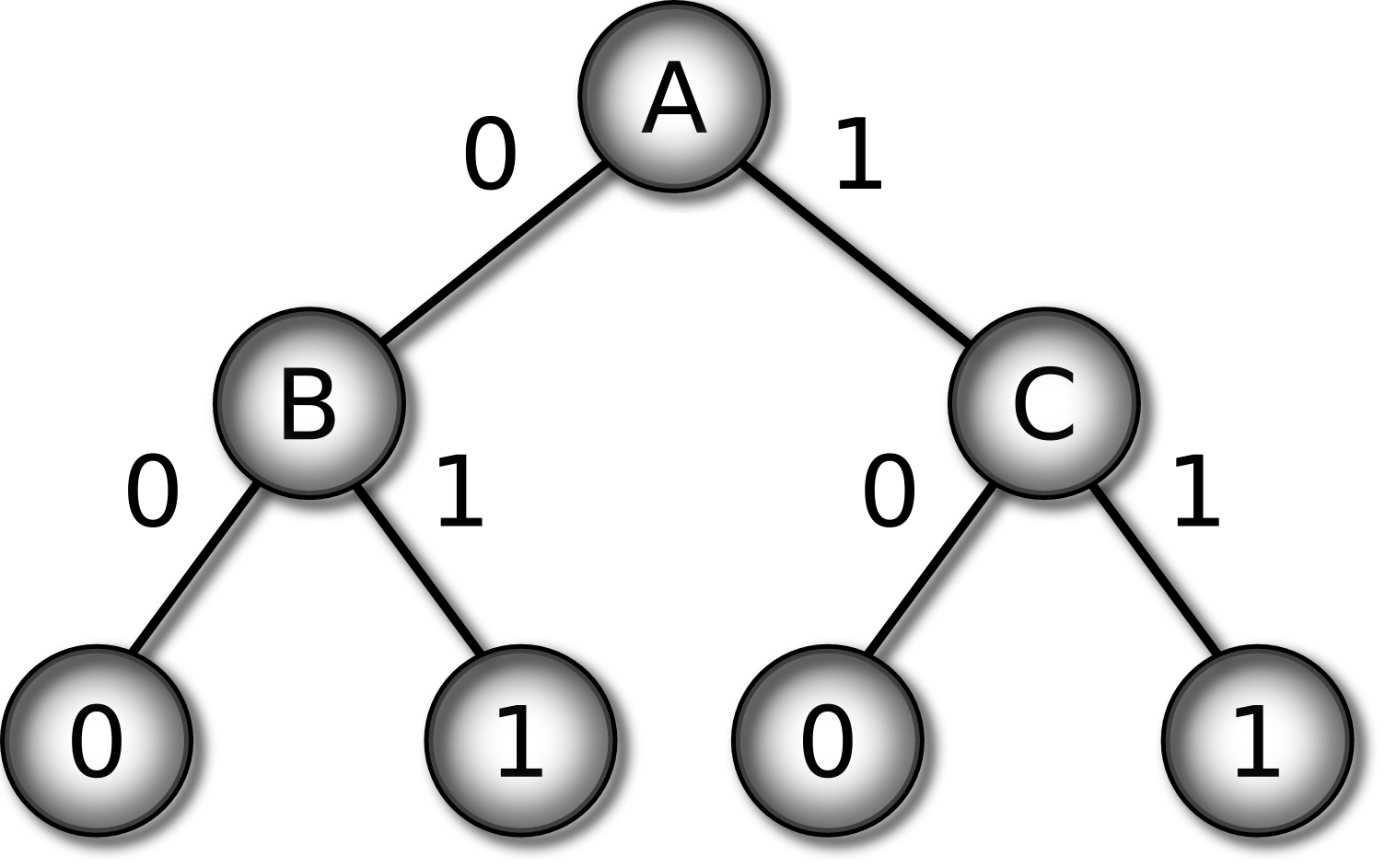
Figure 6 shows the 3 multiplexer as a truth table and as a decision
tree. To classify an input in such a tree: i) start at the root (top)
of tree, ii) follow the branch corresponding to the value of the
attribute in the input, iii) repeat until a leaf is reached, and iv)
output the value of the leaf as the classification of the input.
Figure 6:
Two representations of the 3 multiplexer function: truth
table (left) and decision tree (right)
| A |
B |
C |
Class |
| 0 |
0 |
0 |
0 |
| 0 |
0 |
1 |
0 |
| 0 |
1 |
0 |
1 |
| 0 |
1 |
1 |
1 |
| 1 |
0 |
0 |
0 |
| 1 |
0 |
1 |
1 |
| 1 |
1 |
0 |
0 |
| 1 |
1 |
1 |
1 |
|
|
First-order trees use both
propositional and first-order internal nodes. [239]
found first-order logic made trees more expressive and allowed much
smaller solutions than found by the rule learner CN2 or the tree
learner C4.5, with similar accuracy.
Whereas conventional tree algorithms
learn axis-parallel decision boundaries, oblique trees make tests on a
linear combination of attributes. The resulting trees and more
expressive but have a larger search space. See [32].
In most
GP-based tree evolvers an individual is a complete tree but in
[199] each individual is a tree node. The tree is
built incrementally: one GP run is made for each node. This is similar
to IRL in §2.2 but results are added to a tree structure
rather than a list.
Ensemble ideas have been used in
two ways. First, to reduce fitness computation time and memory
requirements by training on subsamples of the data. The bagging
approach has been used in [94,136] and the boosting
approach in [260]. Although not an ensemble technique, the
Limited Error Fitness method introduced in [101] as a
way of reducing GP run-time works in a similar manner: in LEF the
proportion of the training set used to evaluate fitness depends on the
individual's performance.
The second ensemble approach has improved accuracy by building an
ensemble of GP trees. In [148,227] each run adds
one tree to the ensemble and weights are computed with standard
boosting.
GP Hyperheuristics
Schmidhuber [247] proposed a meta-GP system evolving
evolutionary operators as a way of expanding the power of GP's
evolutionary search.
Instead of evolving decision rules Krasnogor proposes applying GP to
the much harder task of evolving classification algorithms,
represented using grammars
[160,162,163].
Freitas [95] §12.2.3 sketches a similar approach
which he calls algorithm induction while in [226] Pappa and Freitas go
into the subject at length. [42] also deals
with GP hyperheuristics.
GP terminology follows a
convention in the GA field since at least [125] in which
brittleness refers to overfitting or poor generalisation to
unseen cases, and robustness refers to good generalisation.
A feature of the GP literature is that GP is usually evaluated only on
the training set [168,286]. Kushchu has also
criticised the way in which test sets have been used
[168].
Nonetheless GP has the same need for test sets to evaluate
generalisation as other methods [168] and as a result the
ability of GP to perform inductive generalisation is one of the open
issues for GP identified in [286]. See
[168,286] for methods which have been used to
encourage generalisation in GP, many of which can be applied to other
methods.
See Koza's 1994 book [159] for the
basics of evolving decision trees with GP, Wong and Leung's 2000 book
on data mining with grammar-based GP [312], Freitas' 2002
book [95] for a good introduction to GP, decision trees
and both evolutionary and non-evolutionary learning, Poli, Langdon and
McPhee's free 2008 GP book [231], and Vanneschi and Poli's
2010 survey of GP [286]. The GP bibliography has over
5000 entries [171].
Next: Evolving Ensembles
Up: GBML Areas
Previous: GBML for Sub-problems of
Contents
T Kovacs
2011-03-12