We describe a new approach to absolute pose estimation from noisy and outlier contaminated matching point sets for RGB-D sensors. We show that by integrating multiple forms of correspondence based on 2-D and 3-D points and surface normals gives more precise, accurate and robust pose estimates. This is because it gives more constraints than using one form alone and increases the available measurements, espe- cially when dealing with sparse matching sets. We demonstrate the approach by incorporating it within a RANSAC algorithm and introduce a novel direct least-square approach to calculate pose estimates. Results from experiments on synthetic and real data demonstrate improved performance over existing methods.
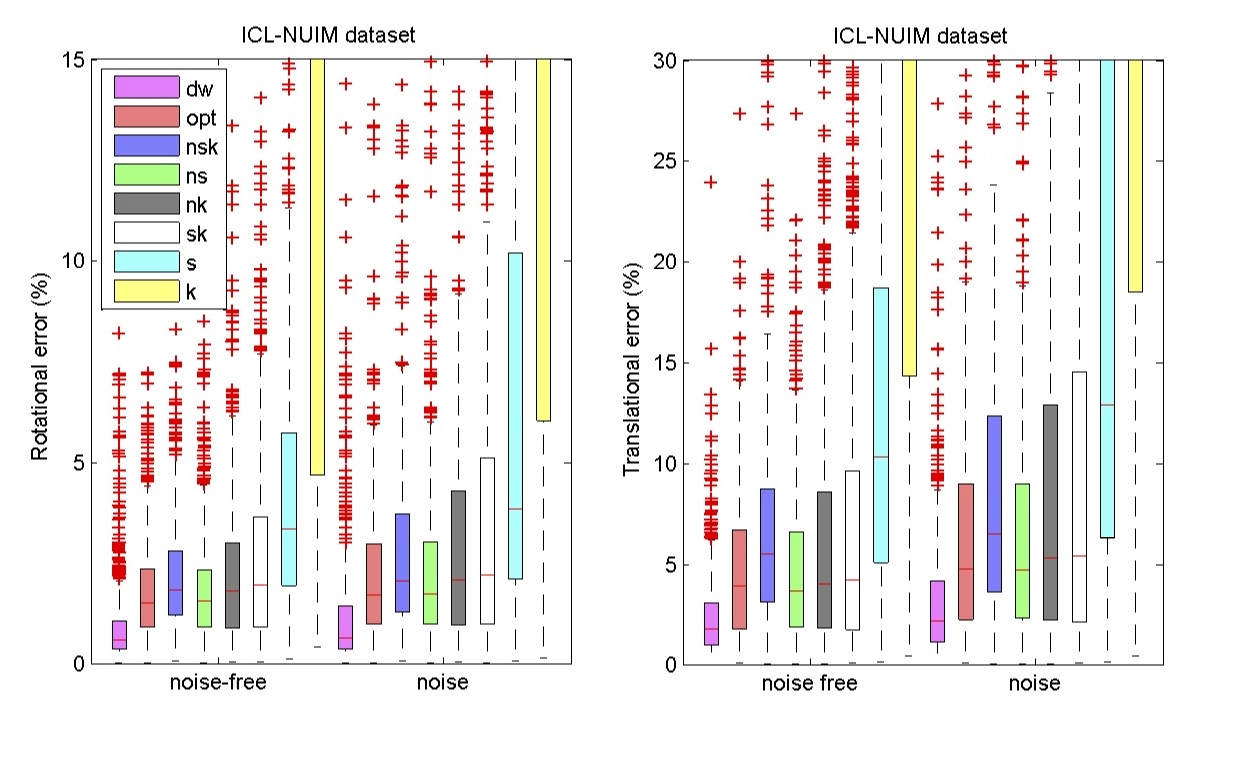
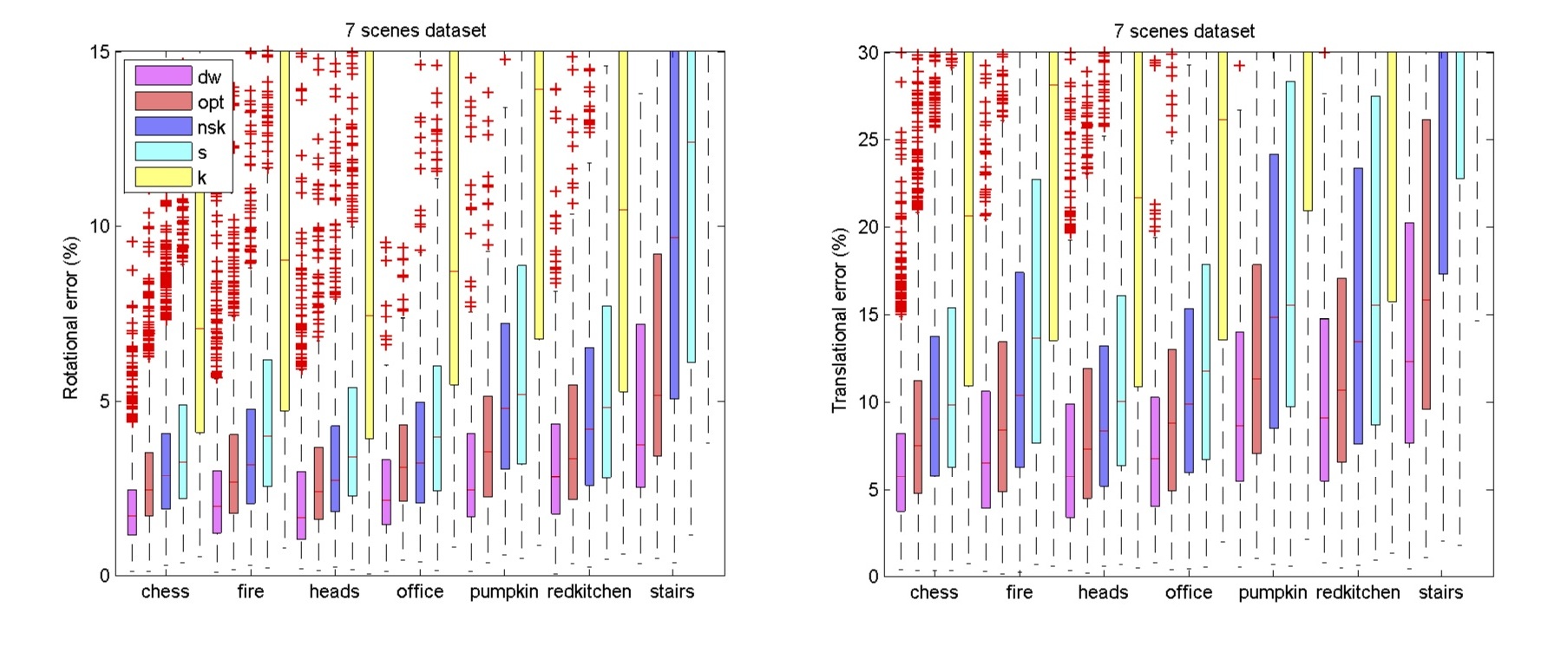
Comparison of the accuracy of our method with the P3P method of Kneip et al. ('k') and the absolute orientation method of Shinji ('s'). Results from three version of our method are shown
HDR appearance model (top) and 3-D surface model (bottom)
 We describe a new approach to absolute pose estimation from noisy and outlier contaminated matching point sets for RGB-D sensors. We show that by integrating multiple forms of correspondence based on 2-D and 3-D points and surface normals gives more precise, accurate and robust pose estimates. This is because it gives more constraints than using one form alone and increases the available measurements, espe- cially when dealing with sparse matching sets. We demonstrate the approach by incorporating it within a RANSAC algorithm and introduce a novel direct least-square approach to calculate pose estimates. Results from experiments on synthetic and real data demonstrate improved performance over existing methods.
We describe a new approach to absolute pose estimation from noisy and outlier contaminated matching point sets for RGB-D sensors. We show that by integrating multiple forms of correspondence based on 2-D and 3-D points and surface normals gives more precise, accurate and robust pose estimates. This is because it gives more constraints than using one form alone and increases the available measurements, espe- cially when dealing with sparse matching sets. We demonstrate the approach by incorporating it within a RANSAC algorithm and introduce a novel direct least-square approach to calculate pose estimates. Results from experiments on synthetic and real data demonstrate improved performance over existing methods.